AUV Bobelto HMI
This project is created based on the HMI requirements of the AUV (Autonomous Underwater Vehicle) made by Blume Team . The main goal of the project is to create a Graphical User Interface (GUI) to visualize the main sensor data to monitor the performance of the Bobelto ROV for the MATE ROV 2022 competition. This HMI was implemented and tested with the robot in the image below.

This project is a compilation of a lot of custom widgets. I explain some of them in the post page. Additionally, a lane line finding algorithm was added. It was implemented in Fluttter SDK for linux desktop. The main advantage of using Flutter SDK is that it can build the application in any platform that Flutter supports (i.e. MacOS, Windows, Linux, iOS, Android). The project repo is availuble on Github.
There are some newer versions of the GUI, tha last one up to date includes the visualization of the joystick controller, as it is shown in the video below.
Contents:
- Flutter commnuication with ROS through websockets
- Sensor data streaming
Final project video:
Project posts
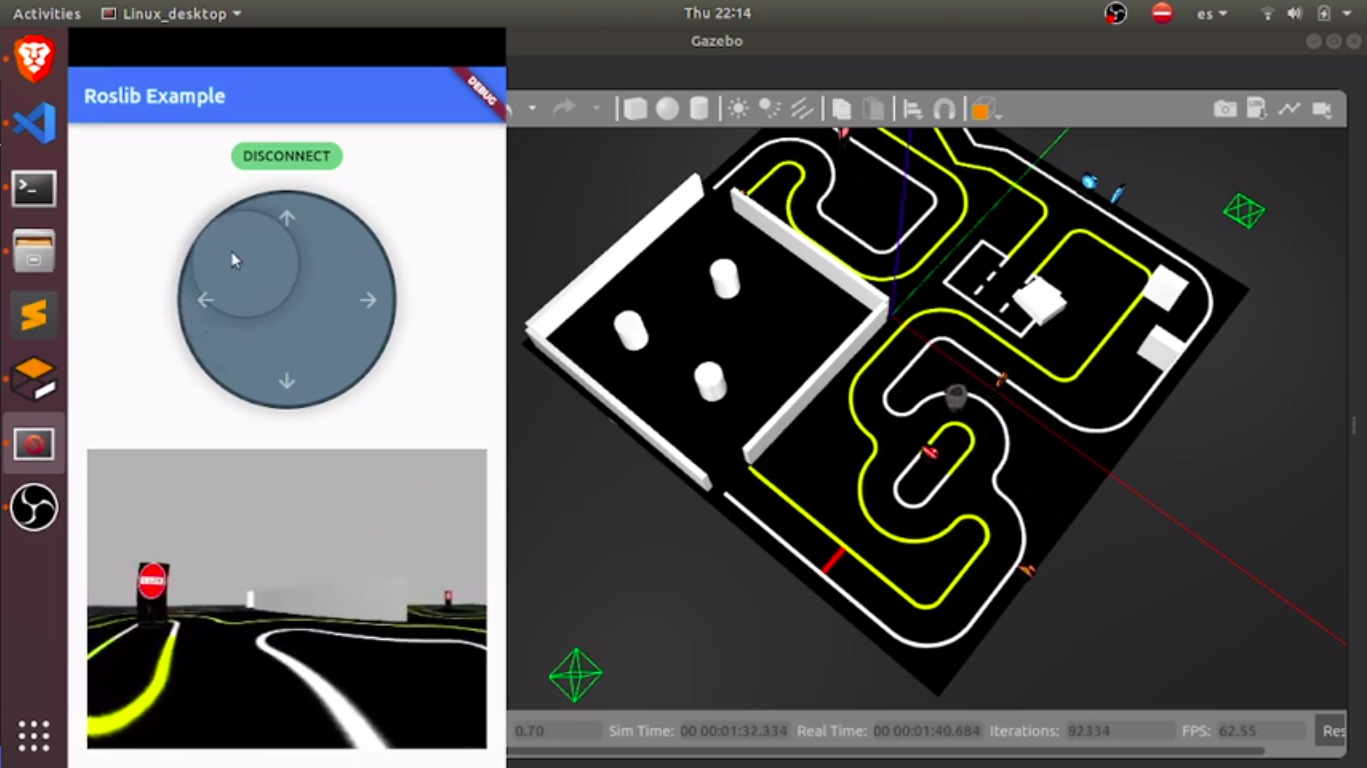
Flutter communication with ROS video streaming
A Flutter application with communication with ROS for interaction with the robot instances in Gazebo simulator.